当前位置:圈子 > 帖子详情

在上一次“电机干货征集”中,我们收到了众多工程师、研发人员的实战经验分享,经过数据整理评估,恭喜以下伙伴的获得奖励:
获奖名单

优质干货
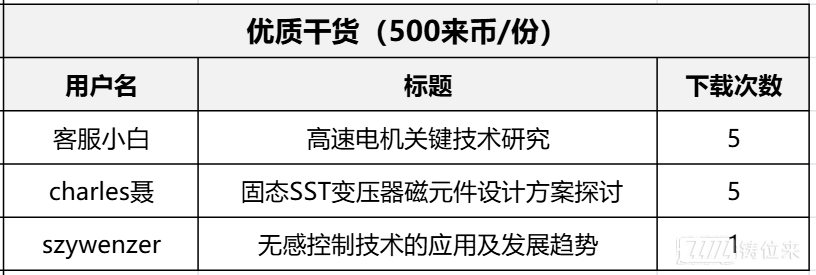
(请获奖人员联系小白领奖)
智能机器人关键模组的技术迭代,离不开一线实战经验的沉淀与分享。无论是伺服设计、模块化集成、减速器匹配,还是半导体选型、供电方案、供应链优化,你的每一个实战案例、避坑经验、创新解法,都可能成为行业同仁的“技术灯塔”。
Part.01
为了让更多干货被看见、被复用,我们正式启动机器人干货征集,用现金奖励激励你输出实战智慧,同时让你的经验登上行业舞台,为技术交流添砖加瓦!
征集|主题
人形机器人伺服单元设计、可靠性验证与扭矩密度优化
关键模组一体化集成(关节+感知+控制的模块化设计)
谐波减速器与电机的匹配优化、散热方案创新
机器人传感器融合、故障诊断与容错控制
半导体器件选型、供电方案(高效/低功耗)设计
关键模组成本控制(元器件到生产工艺)与标准化设计
其他机器人关键模组相关实战经验(如测试、供应链管理、行业适配等)
参与|方式
活动时间:2026年3月3日-3月15日
征集方向:机器人相关领域干货
投稿方式:请将您的干货文档/方案/笔记上传至【干货库】
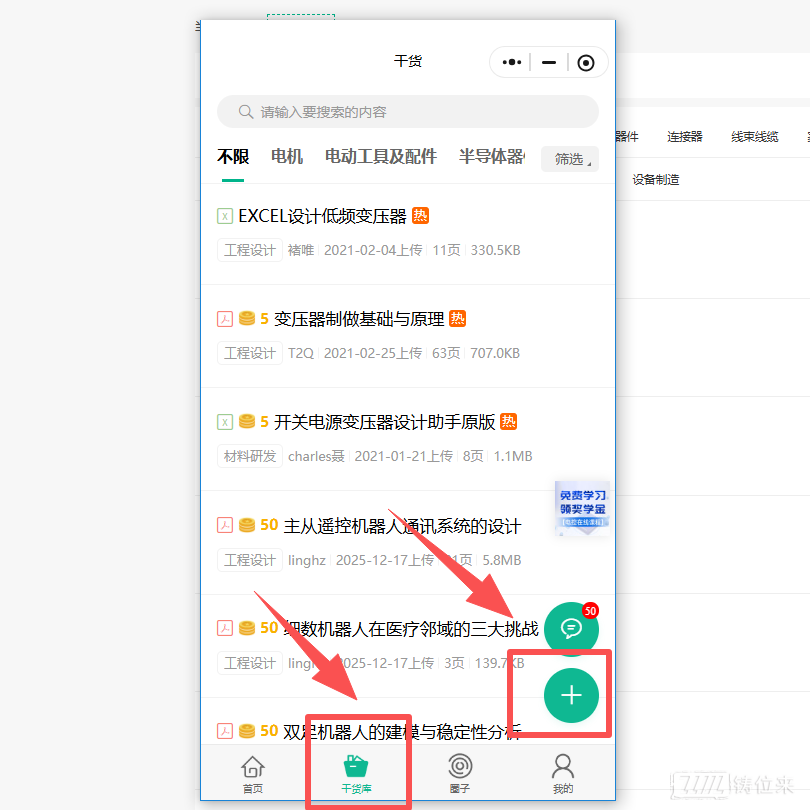
方式一:小程序上传
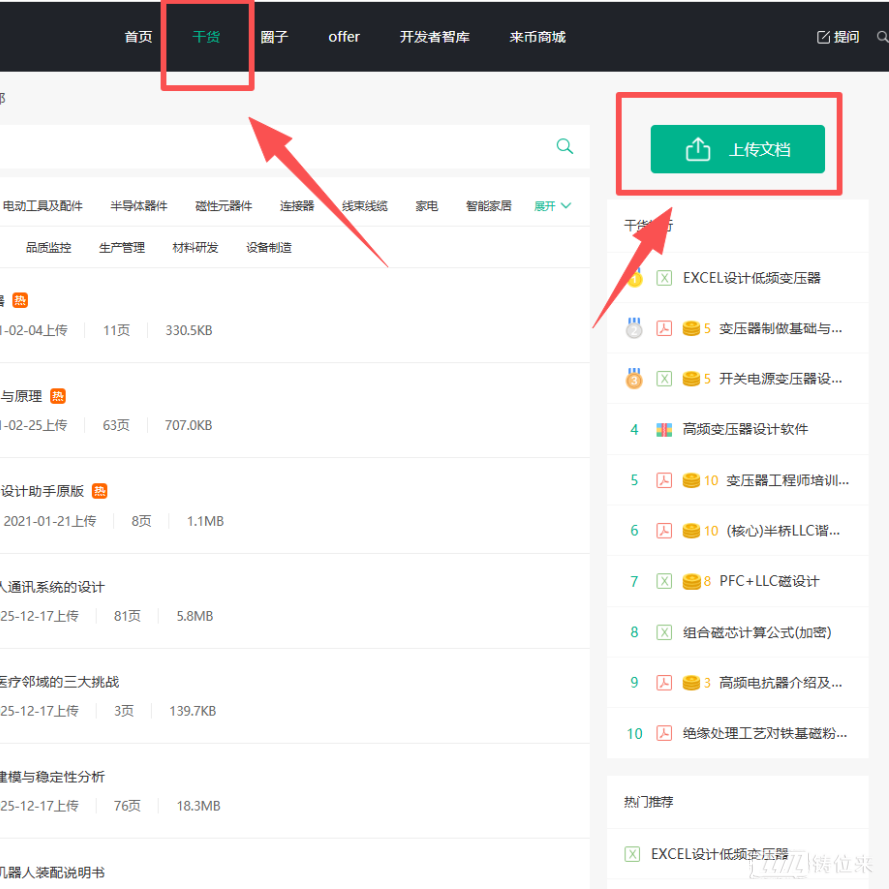
方式二:网页端上传
奖励|机制
奖项 | 条件 | 奖励 |
一等奖1名 | >10份 | 50元红包 |
二等奖3名 | >6份 | 20元红包 |
三等奖5名 | >3份 | 10元红包 |
参与奖n名 | >1份 | 3元红包 |
来币奖励 | >1份 | 100来币/份 |
优质干货 | 下载量前三 | 500来币/份 |
参与|规则
1、上传的干货需符合要求(无重复、无第三方信息且无版权争议)
2、用户违规,铸位来可删除其文档、取消资格与奖励。
3、本活动最终解释权归铸位来所有。
Part.02
我们将在3月26日日举办第二届(深圳)智能机器人关键模组技术创新研讨会,聚焦“关键模组一体化集成、谐波减速器优化、伺服电机扭矩密度提升”等前沿议题,汇聚行业专家、企业代表共探技术突破!
如果你对这场盛会感兴趣,扫描下文的二维码报名或复制链接https://www.big-bit.com/meeting/2026MotorSummit/#/home?ly=888,锁定属于你的参会席位,一起在这场会议上碰撞出思维的火花!
扫码免费报名参会

联系方式:木子 13360009499
- 查看更多打赏